Гидролокатор
Последнее обновление страницы:22 May 2018
Многолучевой гидролокатор
Многолучевой гидролокатор - это распространенный инструмент для морской съемки, который использует несколько звуковых сигналов для обнаружения морского дна. Благодаря наличию нескольких лучей он способен отображать участок морского дна под судном, в отличие от однолучевого гидролокатора, который отображает только точку под судном. Многолучевые гидролокаторы, способные охватывать 100% морского дна, становятся промышленным стандартом для гидрографических и геологических применений. Различные частоты используются для отображения различных глубин воды: более высокие частоты (>100 кГц) используются для мелководья, а низкие частоты (<30 кГц) - для глубокой воды. При различных частотах также существует компромисс в разрешении: мелководные системы с более высокой частотой обеспечивают большее пространственное разрешение, чем глубоководные системы с более низкой частотой.
Как правило, многолучевой гидроакустический преобразователь жестко крепится к корпусу исследовательского судна, и его положение может быть рассчитано очень точно. Другие компоненты многолучевой системы включают вспомогательные датчики, такие как системы обнаружения движения и системы глобального позиционирования (GPS), обеспечивающие точное позиционирование, систему обнаружения движения и измерения скорости звука.
В современных многолучевых гидроакустических датчиках обычно используется поперечная матрица Mills. Звук передается от датчиков, расположенных перпендикулярно трассе съемки. Следовательно, звуковые импульсы формируют полосу пропускания, которая является широкой поперек трассы и узкой вдоль нее. Отраженные звуковые импульсы, которые в основном регистрируют контрастность импеданса и рельеф морского дна, принимаются приемниками, установленными параллельно трассе съемки. Эти отраженные лучи имеют узкую поперечную направленность. В отличие от гидролокатора бокового обзора, который обычно выдает только данные об обратном акустическом рассеянии (т.е. о твердости), многолучевой гидролокатор генерирует данные как о глубине воды, так и о твердости морского дна одновременно.
Профилировщики подводного дна
Системы акустического профилирования дна (SBP) используются для определения физических свойств морского дна, а также для получения изображений и характеристик геологической информации на глубине нескольких метров под морским дном. В последние годы для измерения мелкомасштабных осадочных структур и процессов с высоким временным и пространственным разрешением используются донные профилометры. Эти системы получили широкое распространение среди морских исследователей благодаря своей способности быстро и ненавязчиво собирать данные.
Придонные профилометры обычно состоят из одноканального источника, который посылает звуковые импульсы в мелководные отложения на морском дне. Звуковые импульсы отражаются от морского дна и последующих слоев донных отложений в зависимости от различий в их акустическом сопротивлении (твердости). Акустический импеданс зависит от плотности материала и скорости, с которой звук проходит через этот материал. Разное время, затрачиваемое на то, чтобы этот сигнал был возвращен и зарегистрирован прибором для определения профиля дна, указывает на глубину залегания слоев под морским дном. Поверхность различных слоев горных пород под морским дном нанесена на карту по всей исследуемой территории.
Система профилирования под-дна
Существует ряд неглубоких систем SBP, которые работают с использованием различных типов источников звука и частот (таблица 1). Различные системы SBP используются в зависимости от целей исследования, глубины залегания и предварительной информации о типах горных пород (если они известны). "Пингер" - это высокочастотная система, работающая в диапазоне одиночных частот от 3,5 до 7 кГц. В зависимости от различных факторов, таких как тип донных отложений и характеристики источника звука (частота, мощность), SBPS могут достигать глубины проникновения на морское дно от нескольких метров до более чем 50 м и разрешения по вертикали (толщина слоя) примерно до 0,3 м. SBPs особенно полезны для определения мелководных объектов, таких как скопления газа, заглубленные каналы. Нелинейные параметрические профилировщики дна одновременно передают два сигнала с незначительно отличающимися высокими частотами (например, 100 и 110 кГц). Их взаимодействие генерирует новый низкочастотный сигнал (с разностной частотой) в результате интерференции. Они позволяют достичь очень высокого вертикального разрешения и особенно хороши для использования на мелководье.
Таблица 1. Технические характеристики распространенных систем SBP.
| Системы профилирования подводного дна | Общий частотный диапазон | Глубина проникновения |
|---|---|---|
Параметрический | ~100 кГц | < 100 м, разрешение по вертикали < 0,05 м |
"Щебечущий" | От 3 до 40 кГц | < 100 м, разрешение по вертикали ~0,05 м |
"Пингер" | От 3,5 до 7 кГц | от 10 до 50 м, с разрешением по вертикали 0,2 м |
"Бумер" | От 500 Гц до 5 кГц | от 30 до 100 м с разрешением по вертикали от 0,3 до 1 м |
"Искрящий" | От 50 Гц до 4 кГц | До 1000 м в идеальных условиях, с разрешением по вертикали >2 м |
Данные профилировщика нижнего слоя
Нижние данные профиля используются для целого ряда целей, включая:
- Трехмерное изображение неглубоких слоев морского дна и наслоений донных отложений.
- Оценка экологических соображений при управлении морскими геологическими ресурсами, включая выявление скрытых геологических угроз, таких как подводные оползни, просачивание газа.
- Управление окружающей средой, включая сбор исходных данных для поддержки экологического мониторинга.
- Классификационные карты местообитаний на морском дне.
- Осадочные среды морского дна для разработки моделей донных сред и местообитаний.
Гидролокатор бокового обзора
Гидролокатор бокового обзора использует высокочастотные звуковые импульсы, отражающиеся от морского дна, для создания изображения морфологической формы морского дна и выявления различий в текстуре морского дна и типах субстрата. Как правило, гидролокатор бокового обзора состоит из двух датчиков, установленных в буксируемом корпусе или "рыбе". Датчики также могут быть установлены на любом борту судна, на дистанционно управляемом транспортном средстве (ROV) или на автономном подводном аппарате (AUV). Каждый преобразователь генерирует звуковой импульс в форме веера, направленный перпендикулярно направлению движения судна. Когда звуковой импульс достигает морского дна, часть звука отражается обратно к преобразователю, а часть - от него. Возвращенный звук называется обратным рассеянием.
Сильная отдача (высокое обратное рассеяние) обычно возникает, когда звук отражается от твердых и каменистых поверхностей, в то время как слабая отдача (низкое обратное рассеяние) возникает, если звук отражается от более мягких отложений (например, песка). Из-за геометрии звукового импульса, направленного к морскому дну, препятствие, возвышающееся над морским дном, такое как затонувший корабль или крутой холм, может отбрасывать тени (без возврата) на изображение гидролокатора. Размер тени можно использовать для определения размера объекта (рис. 1).
Со временем, когда гидролокатор перемещается вдоль траектории судна, записанные звуковые отражения формируют акустическое изображение морского дна. Типичные частоты, используемые в гидролокаторе бокового обзора, варьируются от 100 до 500 кГц, при этом более высокие частоты обеспечивают изображение с более высоким разрешением.
Акустическое изображение можно просматривать в режиме реального времени с помощью "водопадного дисплея", на котором полученные данные отображаются в виде записи звука по мере их сбора (рис. 2). Данные также записываются для последующего анализа и интерпретации. Используя GPS-навигатор, данные гидролокационной системы бокового обзора могут отображаться в географическом разрезе.
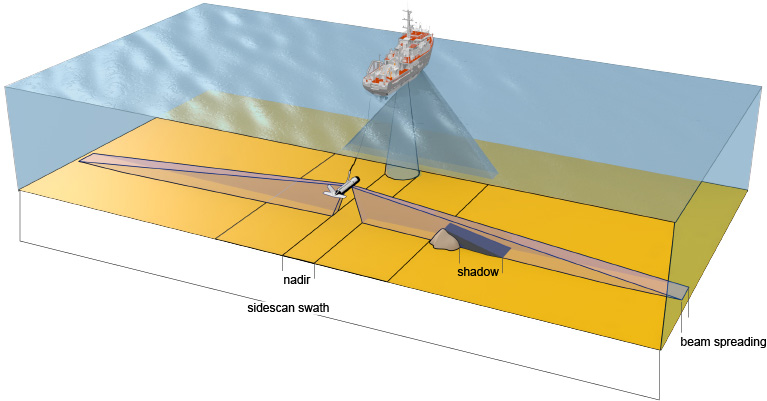
Рисунок 1. Диаграмма направленности гидроакустических систем бокового обзора
Данные гидролокатора бокового обзора
Данные гидролокатора бокового обзора используются для целого ряда целей, включая:
- Описание природных и искусственных особенностей морского дна (рифы, песчаные волны, скалистые выходы, подводная инфраструктура, затонувшие корабли).
- Оценка экологических соображений при управлении морскими геологическими ресурсами, включая местоположение месторождений руды и заполнителей.
- Управление ресурсами для определения подходящих областей (например, возможность прокладки подводных кабелей), где определение типа морского дна и геологических опасностей, таких как подводные оползни и оспины, может оказать значительное влияние на разработку.
- Управление окружающей средой, включая сбор исходных данных для поддержки экологического мониторинга и составления карт местообитаний.
- Военные приложения, такие как обнаружение мин.
- Обнаружение затонувшего судна и расчет его размеров по его тени.
- Системы бокового обзора используются из-за высокого разрешения, которое они обеспечивают, и скорости, с которой они могут охватывать морское дно (широкую полосу). Поэтому они используются для выявления небольших объектов геологического или техногенного происхождения.

Рисунок 2. Изображение гидролокатора бокового обзора, показывающее место кораблекрушения, обнаруженное в районе поиска рейса MH370 в декабре 2015 года. Источник: ATSB.
Гидролокатор в толще воды
Картографирование водной толщи (то есть морской среды между поверхностью океана и морским дном) - это неразрушающий акустический метод с использованием гидролокационных систем, таких как однолучевые и многолучевые гидролокаторы. Данные о толщах воды обычно являются побочным продуктом получения информации о морском дне с помощью гидролокатора. Эта информация извлекается из звуков, которые отражаются обратно на гидроакустический преобразователь после рассеивания частицами в толще воды (рис. 3). К ним относятся такие объекты, как рыба и пузырьки газа. Эту информацию часто называют данными обратного рассеяния в толще воды.
Данные гидролокатора из водной толщи
Данные гидролокатора водной толщи используются для:
- Геофизические и океанографические приложения (обнаружение просачиваний газов и жидкостей, шлейфов наносов, переносимых океанскими течениями).
- Расположение объектов, найденных на морском дне (археология, картографирование обломков).
- Биологические приложения (картографирование косяков рыб и их характеристик, определение биомассы фитопланктона и морских млекопитающих).
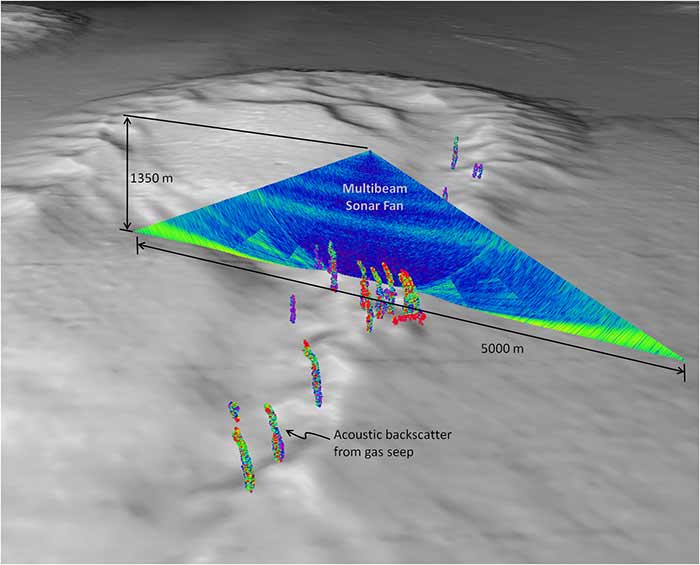
Изображение акустического "среза" водной толщи, на котором видно, как газ просачивается вдоль морского дна. Фото предоставлено Центром картографирования прибрежных районов и океанов Университета Нью-Гэмпшира/Объединенным гидрографическим центром с использованием программного обеспечения IVS Fledermaus
Рекомендации
Хейп, А.Д. (2000). Состав и динамика голоценовых отложений вблизи островов Уитсанди на среднем шельфе платформы Большого барьерного рифа, Австралия.Докторская диссертация, Университет Джеймса Кука, Таунсвилл, Квинсленд. 116пп.
Стокер М.С., Фазан Дж.Б., Джозенханс Х. (1997). Сейсмические методы и интерпретация. В работе Т.А. Дэвиса, Т. Белла, А.К. Купера, Х. Джозенханса, Л. Поляка, А. Солхейма, М.С. Стокера, Дж.А. Страверса (ред.) "Покрытые льдом континентальные окраины: атлас акустических изображений". Чепмен и Холл, Лондон, 1997. 315 стр.
Пенроуз Д.Д., Сивабесси П.Дж.У., Гаврилов А., Парнум И., Гамильтон Л.Дж., Бикерс А., Брук Б., Райан Д.А., Кеннеди П., 2005. Акустические методы классификации морского дна. Совместный исследовательский центр по управлению эстуариями прибрежных зон и водными путями, Технический отчет 32.